Biography
Hey! I am currently working as a Computer Vision, DL and SLAM Research Engineer at Qualcomm XR Research, where I design and optimize multi-camera Visual-Inertial SLAM systems (shipped in Google AndroidXR and Samsung Moohan). My work focuses on improving 6DoF accuracy, robustness, and power efficiency for AR/VR experiences. I have also contributed to 6 accepted patents spanning hybrid classical-DL feature tracking, VLM semantic priors for SLAM, and illumination-robust matching.
Previously, I was at OLA Electric, working on end-to-end autonomous driving agents, semantic BEV occupancy grids, and LiDAR-based mapping. Our team achieved a Silver Medal in the Kaggle Image Matching Challenge 2022, and our research on BEV appearance estimation was featured at ICRA.
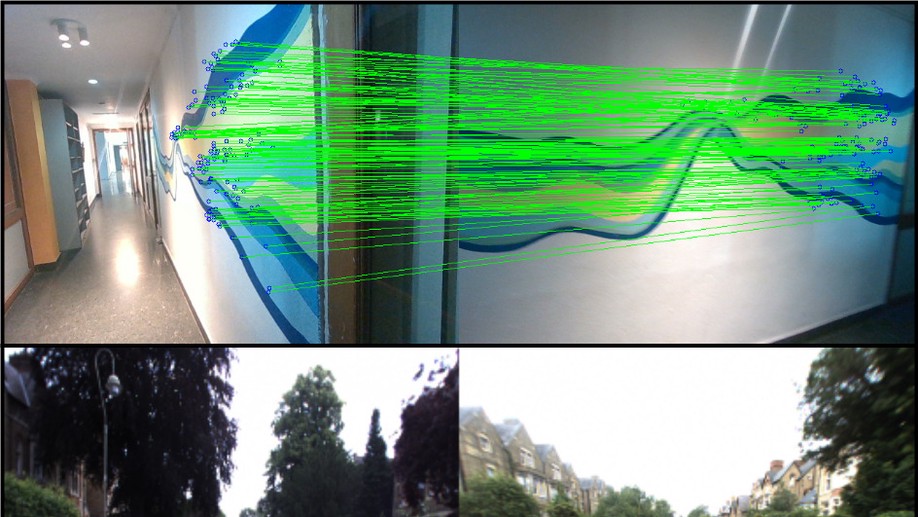
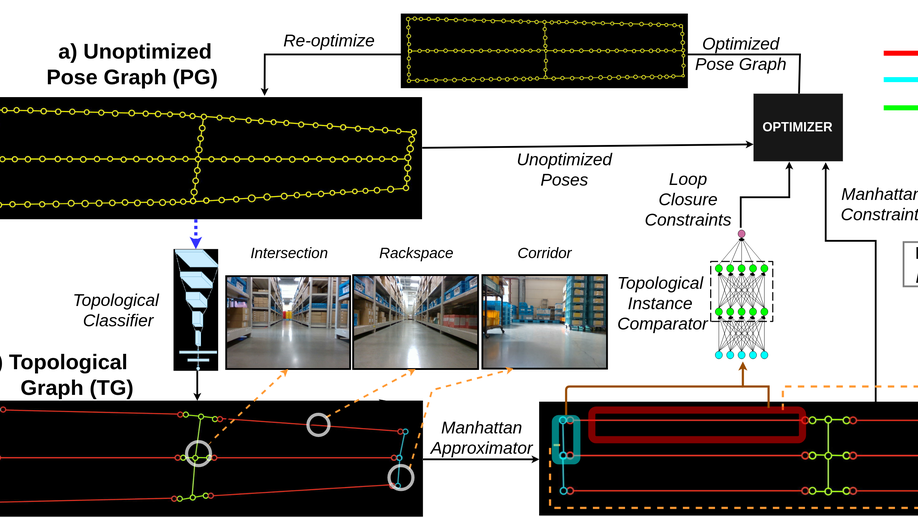
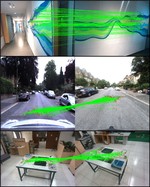
I completed my Master’s at the Robotics Research Center, IIIT Hyderabad, advised by Prof. Madhava Krishna. My research focused on robust pose graph SLAM and rotation-invariant feature matching, with publications in ICRA, IROS, and VISAPP.
Download my resumé.
Interests
- SLAM / State Estimation
- Differentiable Computer Vision
- Optimization
- Robotics
Education
MS by Research in CSE with specialization in Robotics, 2021
International Institute of Information Technology, Hyderabad
B.Tech in Mechanical, 2018
Indian Institute of Technology Jodhpur