Early Bird: Loop Closures from Opposing Viewpoints for Perceptually-Aliased Indoor Environments
Abstract
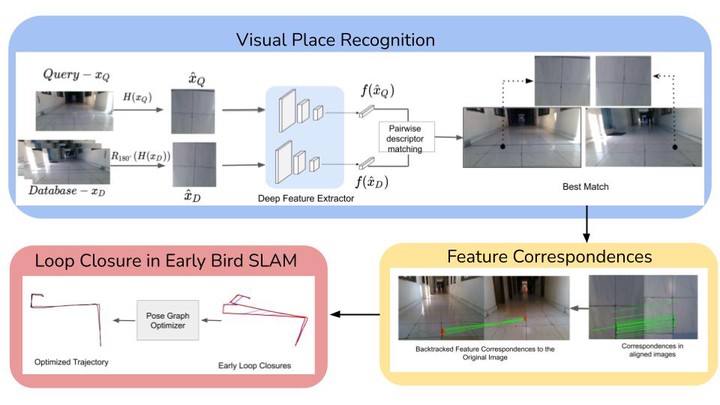
Significant advances have been made recently in Visual Place Recognition (VPR), feature correspondence, and localization due to the proliferation of deep-learning-based methods. However, existing approaches tend to address, partially or fully, only one of two key challenges are viewpoint change and perceptual aliasing. In this paper, we present novel research that simultaneously addresses both challenges by combining deep-learned features with geometric transformations based on reasonable domain assumptions about navigation on a ground-plane, whilst also removing the requirement for specialized hardware setup (e.g. lighting, downwards facing cameras). In particular, our integration of VPR with SLAM by leveraging the robustness of deep-learned features and our homography-based extreme viewpoint invariance significantly boosts the performance of VPR, feature correspondence, and pose graph submodules of the SLAM pipeline. For the first time, we demonstrate a localization system capable of state-of-the-art performance despite perceptual aliasing and extreme 180-degree-rotated viewpoint change in a range of real-world and simulated experiments. Our system is able to achieve early loop closures that prevent significant drifts in SLAM trajectories. We also compare extensively several deep architectures for VPR and descriptor matching. We also show that superior place recognition and descriptor matching across opposite views results in a similar performance gain in back-end pose graph optimization.
Udit Singh Parihar
Computer Vision, DL and SLAM Research Engineer
My research interests include the intersection of 3D Computer Vision, Deep Learning, and SLAM.